(a) Pre-trained FRCRN with adapter embedded;
(b) Adapter; (c) .
Monaural speech enhancement on drone via Adapter based transfer learning
Electrical Engineering and Systems Science > Audio and Speech Processing
Monaural speech enhancement on drone via Adapter based transfer learning
Monaural Speech enhancement on drones is challenging because the ego-noise from the rotating motors and propellers leads to extremely low signal-to-noise ratios at onboard microphones. Although recent masking-based deep neural network methods excel in monaural speech enhancement, they struggle in the challenging drone noise scenario. Furthermore, existing drone noise datasets are limited, causing models to overfit.
Considering the harmonic nature of drone noise, this paper proposes a frequency domain bottleneck adapter to enable transfer learning. Specifically, the adapter's parameters are trained on drone noise while retaining the parameters of the pre-trained Frequency Recurrent Convolutional Recurrent Network (FRCRN) fixed. Evaluation results demonstrate the proposed method can effectively enhance speech quality. Moreover, it is a more efficient alternative to fine-tuning models for various drone types, which typically requires substantial computational resources.
This paper proposes a frequency domain bottleneck adapter to enable transfer learning for monaural speech enhancement on drones.
The paper mentions that the signal-to-noise ratio (SNR) of the microphone recordings on the drone is typically very low, ranging from -25 to -5 dB, due to the proximity of the microphone to the drone's noise sources such as motors and propellers.
Specifically, in Section 4.1 on the dataset generation, it states:
"Clean speech segments and noise segments are randomly cropped to the same length and then mixed at an SNR varying from -25 to -5 dB. In total, we generate 5 hours of training data, 1 hour of validation data, and 1 hour of testing data. The average SNR is -15 dB."
The key points are:
1. Monaural speech enhancement on drones is challenging due to very low signal-to-noise ratios from drone ego-noise. Existing masking-based deep learning methods struggle in this scenario.
2. The proposed method uses an adapter, whose parameters are trained on drone noise, while keeping the parameters of a pre-trained Frequency Recurrent Convolutional Recurrent Network (FRCRN) fixed.
3. The adapter is designed to capture the harmonic nature of drone noise and is embedded in the encoder of the FRCRN after each convolutional recurrent block.
4. The adapter has separate real and imaginary cells to process complex spectra, with frequency domain downward and upward projections.
5. Evaluation on drone datasets shows the proposed adapter tuning method effectively enhances speech quality and intelligibility while being more parameter-efficient than fine-tuning the pre-trained model.
In summary, the frequency domain bottleneck adapter enables effective transfer learning for the challenging task of monaural speech enhancement in the presence of strong harmonic drone noise, outperforming baseline methods.
FRCRN
The pre-trained Frequency Recurrent Convolutional Recurrent Network (FRCRN) is a deep learning model that has achieved state-of-the-art results in the recent Deep Noise Suppression (DNS) challenge, which includes a wide variety of noise types.
Key features of the FRCRN architecture (refer to Fig. 2a in the paper):
1. Convolutional Recurrent (CR) blocks: Each CR block is composed of a convolutional layer and a Feedforward Sequential Memory Network (FSMN) layer. This design allows the model to capture local temporal-spectral structures and long-range frequency dependencies.
2. Encoder module: The encoder consists of multiple CR blocks stacked together. The FSMN layer in the encoder processes frequency-domain information, which makes it suitable for learning the characteristics of drone noise.
3. Attention block: An attention mechanism is used as a skip connection between the encoder and decoder to facilitate information flow.
4. Decoder module: The decoder reconstructs the enhanced speech signal from the learned features.
The FRCRN is well-suited for speech enhancement in the presence of drone noise because:
1. The CR blocks can capture the long-range frequency correlations present in the harmonic structure of drone noise.
2. The FSMN layer in the encoder processes frequency-domain information, which is beneficial for learning the spectral characteristics of drone noise.
The FRCRN is pre-trained on a large dataset containing various noise types, allowing it to learn generalizable features for speech enhancement. This pre-training enables effective transfer learning to the specific case of drone noise suppression using the proposed frequency domain bottleneck adapter.
proposed adapter tuning method
The proposed adapter tuning method involves adding a frequency domain bottleneck adapter to the pre-trained FRCRN model and training only the adapter parameters on the drone noise dataset while keeping the pre-trained FRCRN parameters fixed.
Key points about the adapter and its tuning method:
1. The adapter is designed to learn the harmonic characteristics of drone noise and is embedded in the encoder module of the FRCRN after each CR block (Fig. 2a).
2. The adapter consists of two cells, one for the real part and one for the imaginary part of the complex spectra (Fig. 2b). The outputs of these cells are combined according to the properties of complex numbers.
3. Each adapter cell performs a frequency domain downward projection, followed by a ReLU activation and an upward projection back to the original frequency dimension (Fig. 2c). This helps in learning the frequency-dependent characteristics of drone noise.
4. During adapter tuning, only the adapter parameters and the attention block parameters are trained on the drone noise dataset, while the pre-trained FRCRN parameters are kept frozen. This allows the model to adapt to the specific characteristics of drone noise without overfitting, given the limited size of the drone noise dataset.
Performance
Performance of the proposed adapter tuning method (refer to Table 2 in the paper):
1. The adapter tuning method outperforms all competing methods, including fine-tuning, in terms of PESQ, ESTOI, and SI-SNR metrics.
2. Compared to the noisy speech, the adapter tuning method achieves an improvement of 0.25 in PESQ, 0.38 in ESTOI, and 17.52 dB in SI-SNR.
3. The adapter tuning method is more parameter-efficient than fine-tuning, with only 0.3 million trainable parameters compared to 1.2 million for fine-tuning.
4. The enhanced speech obtained using the adapter tuning method has a similar sound power distribution to the clean speech (Fig. 3c), and the output speech is much cleaner with an 18 dB SNR improvement (Fig. 3d).
In summary, the proposed frequency domain bottleneck adapter and its tuning method effectively adapt the pre-trained FRCRN to the specific characteristics of drone noise, resulting in significant improvements in speech quality and intelligibility while being parameter-efficient.
Authors
The authors of the paper are Xingyu Chen <u6256034@anu.edu.au>, Hanwen Bi, Wei-Ting Lai, and Fei Ma. However, the paper does not provide information about their associations or affiliations, but they appear to be associated with the Australian National University School of Engineering Deparment of Audio and Acoustic Signal Processing
Prior work by some of the authors:
1. Hanwen Bi and Fei Ma have a previous publication related to drone noise measurements and modeling:
H. Bi, F. Ma, T. D. Abhayapala, and P. N. Samarasinghe, "Spherical array based drone noise measurements and modelling for drone noise reduction via propeller phase control," in IEEE Workshop Appl. Signal Process. Audio Acoust. IEEE, 2021, pp. 286–290.
In this work, they used a spherical microphone array to measure and model drone noise and proposed a method for drone noise reduction using propeller phase control.
The paper also cites several relevant works by other researchers in the field of drone noise suppression and monaural speech enhancement:
1. L. Wang and A. Cavallaro have multiple publications on audio processing for drones, including:
- "Acoustic sensing from a multi-rotor drone," IEEE Sens. J., vol. 18, no. 11, pp. 4570–4582, 2018.
- "Ear in the sky: Ego-noise reduction for auditory micro aerial vehicles," in IEEE Int. Conf. Adv. Video Signal Based Surveill. IEEE, 2016, pp. 152–158.
- "Deep learning assisted time-frequency processing for speech enhancement on drones," IEEE Trans. Emerg. Topics Comput. Intell., vol. 5, no. 6, pp. 871–881, 2020.
2. D. Mukhutdinov, A. Alex, A. Cavallaro, and L. Wang recently published a comprehensive evaluation of deep learning models for single-channel speech enhancement on drones:
D. Mukhutdinov, A. Alex, A. Cavallaro, and L. Wang, "Deep learning models for single-channel speech enhancement on drones," IEEE Access, vol. 11, pp. 22993–23007, 2023.
These prior works highlight the growing interest and research efforts in the field of drone noise suppression and speech enhancement, which the current paper builds upon by proposing a novel frequency domain bottleneck adapter for transfer learning.
Submission history
From: Xingyu Chen [view email][v1] Thu, 16 May 2024 12:03:58 UTC (6,032 KB)
monaural speech enhancement on drone via Adapter based transfer learning
Abstract
Monaural Speech enhancement on drones is challenging because the ego-noise from the rotating motors and propellers leads to extremely low signal-to-noise ratios at onboard microphones. Although recent masking-based deep neural network methods excel in monaural speech enhancement, they struggle in the challenging drone noise scenario. Furthermore, existing drone noise datasets are limited, causing models to overfit. Considering the harmonic nature of drone noise, this paper proposes a frequency domain bottleneck adapter to enable transfer learning. Specifically, the adapter’s parameters are trained on drone noise while retaining the parameters of the pre-trained Frequency Recurrent Convolutional Recurrent Network (FRCRN) fixed. Evaluation results demonstrate the proposed method can effectively enhance speech quality. Moreover, it is a more efficient alternative to fine-tuning models for various drone types, which typically requires substantial computational resources.
Index Terms— drone audition, speech enhancement, single-channel, ego-noise reduction, fine-tuning
1 Introduction
Speech enhancement using a drone-mounted microphone enables services in diverse areas, such as search and rescue missions, video capture, and filmmaking [1]. However, the microphone’s proximity to the drone’s noise sources, such as motors and propellers, results in an extremely low signal-to-noise ratio (SNR) of recordings, typically ranging from -25 to -5 dB [2]. This severely limits the drone audition applications.
While multi-channel microphone array methods are commonly used to improve audio quality, they often require specialized hardware that is either too large or heavy for most drones. For instance, drones used in the DREGON dataset [3] are equipped with an 8-channel microphone array and have a total weight of up to 1.68 kg, and Wang et al. [4] employ a drone with a 0.2 m diameter circular microphone array. Moreover, the performance of these methods degrades significantly in dynamic scenarios with moving microphones or sound sources [5]. Thus, developing efficient single-channel solutions is preferred for extending the applicability of drone audition.
Monaural speech enhancement, or single-channel noise suppression, has been extensively studied for decades. Traditional approaches include spectral subtraction [6] and wiener filtering [7], while recent advances use deep neural networks (DNNs). Particularly, masking-based DNN methods showcased promising results in recent Deep Noise Suppression Challenges (DNS) [8]. These methods often use Convolutional Recurrent Networks (CRNs) to extract features from temporal-spectral patterns, and then predict a ratio mask for noisy speech on the time-frequency spectrum [9, 10, 11]. However, these models are typically optimized for scenarios with relatively high input SNRs (e.g., dB). Applying these pre-trained models directly to drone noise often results in sub-optimal enhancement performance.
Research specifically addresses drone noise suppression is still in its early stages [12], and public drone noise datasets are relatively small [3, 5, 13, 14], containing only a few types of drones and lacking the diversity needed for training. Mukhutdinov et al. [2] comprehensively evaluated the performance of DNNs in monaural speech enhancement on drones. They rely on limited drone noise datasets, leading to the overfitting to specific drone types.
To address challenges in drone audition, we propose a frequency domain bottleneck adapter for transfer learning, specifically designed to capture the harmonic nature of drone noise. This adapter-based tuning method selectively trains adapter parameters while retaining the pre-trained model’s parameters [15, 16], which prevents overfitting with the small-scale training data. We apply this method by fine-tuning a pre-trained FRCRN on drone noise datasets. The proposed method efficiently adapts to the distinct acoustic characteristics of various drone types, thereby enhancing speech quality and intelligibility in drone recordings. This advancement paves the way for broader applications of drone audition.
2 PROBLEM FORMULATION
Consider a single microphone mounted on a flying drone to capture human speeches as shown in Fig. 1a. The microphone recording can be represented as
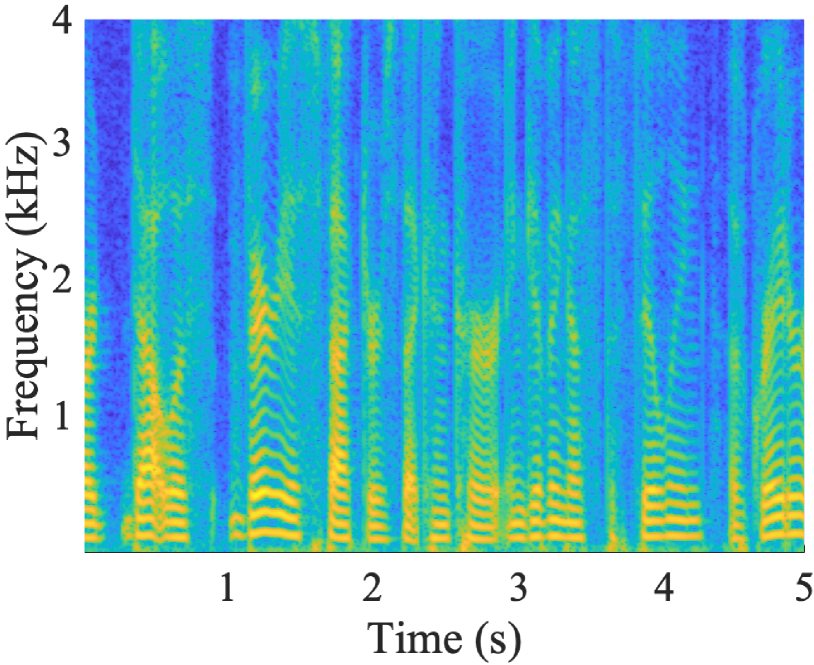
(1) where denotes the clean speech with being the time index, is the impulse response between the human and the microphone, denotes the noise, and denotes the convolution operation. is mainly contributed by the drone propeller rotations and vibrations of the structure and is dominated by multiple narrow-band noises [17, 18], as demonstrated in Fig. 1b. As the drone-mounted microphone is close to the noise sources (i.e. motors and propellers), the SNR of is very low, resulting in the extreme difficulty in uncovering from . This is demonstrated in Fig. 1c.

(a) 
(b) 
(c) 
(d) Fig. 1: Problem setup: (a) illustration of the monaural speech recording scenario over a flying drone (b) drone ego noise in the frequency domain (c) noisy speech in the time domain (d) noisy speech in the time-frequency domain. To leverage information from both the time and frequency domains, we apply the Short-Time Fourier Transform (STFT) to Eq.(1), yielding the Time-Frequency (T-F) domain representation:
(2) where , and are the complex spectra of , and , respectively, with denotes the frequency bin index and denotes the frame index. Fig. 1d illustrates a typical , highlighting the time-frequency sparsity of harmonic noise and energy concentrated at isolated frequency bins.
The noisy speech can be enhanced by Complex masking [19]. In the ideal case, the enhanced speech is obtained by
(3) where is the complex Ideal Ratio Mask (cIRM), and is element-wise complex multiplication. The cIRM is formulated by
(4) where and are, respectively, given by
(5) where r and i denote the real and imaginary components of the spectra, respectively. Since is unknown, directly deriving is not feasible. Then, the research problem reduces to estimate a complex mask that approximates using the single channel recording and the pre-knowledge about drone noise.
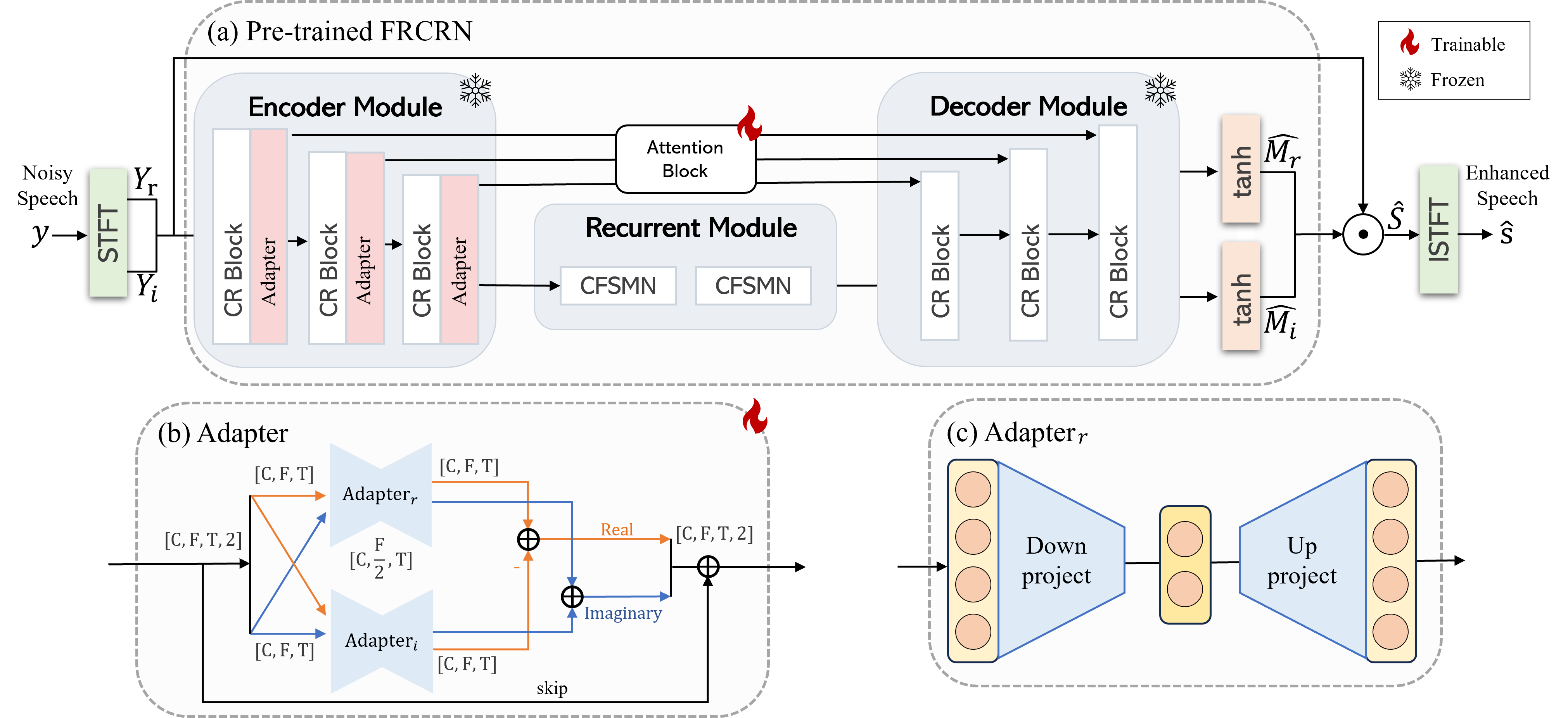
Fig. 2: The overview of Adapter pipeline. (a) Pre-trained FRCRN with adapter embedded; (b) Adapter; (c) . 3 methodology
3.1 Transfer learning with FRCRN
To enhance monaural speech for drones, we develop a transfer learning-based method to estimate the using the FRCRN. FRCRN achieves state-of-the-art (SOTA) results in the recent DNS challenge [8], which includes a wide variety of noise types. Fig. 2a shows the FRCRN architecture with convolutional recurrent (CR) blocks, each comprised of a convolutional layer and a Feedforward Sequential Memory Network (FSMN) layer. This design enables the model to capture local temporal-spectral structures and long-range frequency dependencies, making it well-suited for exploiting the long-range frequency correlations found in drone noise [17].
3.2 Adapter tuning on FRCRN
Transfer learning includes fine-tuning and adapter tuning, both of which involve copying the parameters from a pre-trained FRCRN and tuning them on the target data. The fine-tuning trains on a subset of pre-trained model parameters, while the adapter-based tuning method only trains on the adapter parameters but keeps the pre-trained model’s parameters fixed, making adapter tuning more parameter-efficient.
We propose a frequency domain bottleneck adapter to learn drone noise characteristics. Figure 2a shows the adapter embedded in the encoder module, positioned after each CR block. When tuning the drone dataset, the pre-trained model’s parameters are frozen, and the parameters of the adapter and the attention block are fine-tuned to learn. The attention block acts as the skip pathway to facilitate information flow, hence it is kept unfrozen.
Figure 2b illustrates the structure of the adapter. The adapter is used to process features in the frequency domain. The input and output dimensions of the adapter remain consistent. The adapter has a skip connection, and its parameters are initialized to zero, configuring the adapter as an approximate identity function.
The detailed operations of the adapter are as follows. The adapter consists of two cells for the real and imaginary parts of the input, and the outputs are combined according to the properties of complex numbers:
(6) Figure 2c illustrates the real cell operation. For a real part of a feature map , , , denote channel, frame, and frequency dimensions, respectively, applying the real cell of the adapter results in the output :
(7) Here, represents the ReLU activation function. performs a frequency domain downward projection, reducing to , and is a frequency domain upward projection, expanding back to . The terms and are biases. Complex cell shares the same structural as the real cell.
3.3 Loss function
The original loss function for FRCRN combines scale-invariant SNR (SI-SNR) and the mean squared error (MSE) losses of cIRM estimates. In our approach, we use only SI-SNR as the loss function to avoid the need to balance two losses. The SI-SNR loss is defined as [20].
4 EXPERIMENTS
4.1 Dataset
We use clean speech and drone ego-noise to generate clean-noisy pairs for training, validation, and testing. Clean speech data is sourced from DNS-2022 [8] and LibriSpeech [21]. Table 1 details the drone ego-noise datasets, which include AS [5], AVQ [14], DREGON [3] and samples using DJI Phantom 2. The IDs for AS and AVQ are based on data entries from a public repository11https://zenodo.org/records/4553667, while the IDs for DREGON and DJI describe flight states. The noise types are categorized based on flight conditions, specifically constant denotes noise levels are relatively stable, dynamic denotes noise levels varying. For multichannel recordings, only single-channel data is used. Some audio samples have been trimmed to remove takeoff sequences, and all audio samples are resampled at 16 kHz.
Table 1: Drone ego-noise dataset Dataset ID Noise type Length [s] AS [5] n121 constant 130 n122 dynamic 140 AVQ [14] n116 constant 120 n117 constant 120 n118 constant 40 n119 constant 210 n120 dynamic 214 DREGON [3] Free Flight dynamic 72 Hovering constant 25 UpDown dynamic 28 Rectangle dynamic 25 Spinning constant 23 DJI Free Flight dynamic 60 Hovering constant 60 The training set is generated using clean speech from DNS-2022 and drone ego-noise from AVQ (excluding n116), DREGON, and DJI. The validation set is generated using clean speech from DNS-2022 and noise from AVQ’s n116. The test set is created with clean speech from LibriSpeech and drone ego-noise from AS. Clean speech segments and noise segments are randomly cropped to the same length and then mixed at an SNR varying from -25 to -5 dB. In total, we generate 5 hours of training data, 1 hour of validation data, and 1 hour of testing data. The average SNR is -15 dB. Considering that the duration of existing drone ego-noise datasets are short, we did not generate longer-duration data.
4.2 Evaluation
We compare the proposed method (Adapter tuning) with 3 methods: (i) a pre-trained FRCRN without tuning (w/o tuning); (ii) an untrained FRCRN, trained on the training data (w/o pre-trained); (iii) a fine-tuning method (Fine-tuning) where only the FSMN in the encoder module and attention block are trainable. To conduct a comprehensive evaluation, multiple evaluation metrics are used, including the Perceptual Evaluation of Speech Quality (PESQ) [22], Extended Short-Time Objective Intelligibility Measure (ESTOI) [23], and SI-SNR [20]. Additionally, we compare the efficiency of different methods in terms of the number of trainable parameters.
(a) 
(b) 
(c) 
(d) Fig. 3: Results comparison: (a) clean speech (b) noisy speech (c) adapter tuning enhanced speech (d) noisy speech and adapter tuning enhanced speech in time-domain. Table 2: Evaluation results Trainable Params(m) Evaluation Metrics PESQ ESTOI SI-SNR Noisy speech - 1.06 0.09 -14.65 w/o tuning - 1.04 0.32 -8.49 w/o pre-trained 14 1.25 0.36 2.56 Fine-tuning 1.2 1.12 0.32 2.64 Adapter tuning The results are presented in Table 2. Overall, Adapter tuning outperforms the competing methods for all metrics. The w/o tuning shows limited effectiveness, as it is not designed for drone scenarios. w/o pre-trained demonstrates improved performance, especially in PESQ and SI-SNR. This indicates the significant difference between drone noise and the noise in the normal training dataset. Although the FSMN layer in the encoder module processes frequency-domain information as the proposed adapter, Fine-tuning does not yield optimal results. This may be because Fine-tuning leads to the forgetting of previously learned information, whereas Adapter tuning preserves all pre-trained parameters. The numbers of trainable parameters indicate the efficiency of the proposed method which surpasses Fine-tuning with much less trainable parameters.
Figure 3 illustrates the time-frequency spectra of a segment of clean speech, noisy speech, adapter enhanced speech, and the time-domain plot of the speech before and after enhancement. As shown in Fig. 3b, (i) in the noisy speech, the speech is obscured in the drone noise, and sound power is mainly concentrated in the harmonic frequencies; (ii) comparing Fig. 3c with Fig. 3a, the enhanced speech has a similar sound power distribution to the clean speech, indicating the effectiveness of the proposed method; (iii) as shown in Fig. 3d, the enhanced speech is much cleaner with an 18 dB SNR improvement.
5 conclusions
Due to the cost and weight constraint, monaural speech enhancement for drones is preferred over multichannel speech enhancement. However, the absence of spatial information and the low SNR makes monaural speech enhancement challenging. By exploiting the harmonic nature of the drone ego noise, this paper developed a frequency domain bottleneck adapter for transfer learning. The method takes advantage of transfer learning to re-uses knowledge learned from large data, thereby achieving effective training on small data. The proposed method enhances speech quality and intelligibility in drone recordings, paving the way for broader drone audition applications.
References
[1] M. Basiri, F. Schill, P. U. Lima, and D. Floreano, “Robust acoustic source localization of emergency signals from micro air vehicles,” in IEEE/RSJ Int. Conf. Intell. Robots Syst. IEEE, 2012, pp. 4737–4742.- [2] D. Mukhutdinov, A. Alex, A. Cavallaro, and L. Wang, “Deep learning models for single-channel speech enhancement on drones,” IEEE Access, vol. 11, pp. 22993–23007, 2023.
- [3] M. Strauss, P. Mordel, V. Miguet, and A. Deleforge, “Dregon: Dataset and methods for uav-embedded sound source localization,” in IEEE/RSJ Int. Conf. Intell. Robots Syst. IEEE, 2018, pp. 1–8.
- [4] L. Wang and A. Cavallaro, “Ear in the sky: Ego-noise reduction for auditory micro aerial vehicles,” in IEEE Int. Conf. Adv. Video Signal Based Surveill. IEEE, 2016, pp. 152–158.
- [5] L. Wang and A. Cavallaro, “Acoustic sensing from a multi-rotor drone,” IEEE Sens. J., vol. 18, no. 11, pp. 4570–4582, 2018.
- [6] I. Cohen, “Noise spectrum estimation in adverse environments: Improved minima controlled recursive averaging,” IEEE Trans. Speech Audio Process., vol. 11, no. 5, pp. 466–475, 2003.
- [7] S. S. Haykin, Adaptive filter theory, Pearson Education India, 2002.
- [8] H. Dubey, V. Gopal, R. Cutler, S. Matusevych, S. Braun, E. S. Eskimez, M. Thakker, T. Yoshioka, H. Gamper, and R. Aichner, “Icassp 2022 deep noise suppression challenge,” in IEEE Int. Conf. Acoust. Speech Signal Process., 2022.
- [9] K. Tan and D. Wang, “A convolutional recurrent neural network for real-time speech enhancement.,” in Interspeech, 2018, vol. 2018, pp. 3229–3233.
- [10] Y. Hu, Y. Liu, S. Lv, M. Xing, S. Zhang, Y. Fu, J. Wu, B. Zhang, and L. Xie, “Dccrn: Deep complex convolution recurrent network for phase-aware speech enhancement,” arXiv preprint arXiv:2008.00264, 2020.
- [11] S. Zhao, B. Ma, K. N. Watcharasupat, and W.-S. Gan, “Frcrn: Boosting feature representation using frequency recurrence for monaural speech enhancement,” in IEEE Int. Conf. Acoust. Speech Signal Process. IEEE, 2022, pp. 9281–9285.
- [12] L. Wang and A. Cavallaro, “Deep learning assisted time-frequency processing for speech enhancement on drones,” IEEE Trans. Emerg. Topics Comput. Intell., vol. 5, no. 6, pp. 871–881, 2020.
- [13] O. Ruiz-Espitia, J. Martinez-Carranza, and Rasco., “Aira-uas: an evaluation corpus for audio processing in unmanned aerial system,” in 2018 International Conference on Unmanned Aircraft Systems (ICUAS). IEEE, 2018, pp. 836–845.
- [14] L. Wang, R. Sanchez-Matilla, and A. Cavallaro, “Audio-visual sensing from a quadcopter: dataset and baselines for source localization and sound enhancement,” in IEEE/RSJ Int. Conf. Intell. Robots Syst. IEEE, 2019, pp. 5320–5325.
- [15] S.-A. Rebuffi, H. Bilen, and A. Vedaldi, “Learning multiple visual domains with residual adapters,” Advances in Neural Information Processing Systems (NeurIPS), vol. 30, 2017.
- [16] N. Houlsby, A. Giurgiu, S. Jastrzebski, B. Morrone, De L.Q., M. Gesmundo, A.and Attariyan, and S. Gelly, “Parameter-efficient transfer learning for nlp,” in International conference on machine learning (ICML). PMLR, 2019, pp. 2790–2799.
- [17] G. Sinibaldi and L. Marino, “Experimental analysis on the noise of propellers for small uav,” Appl. Acoust., vol. 74, no. 1, pp. 79–88, 2013.
- [18] H. Bi, F. Ma, T. D. Abhayapala, and P. N. Samarasinghe, “Spherical array based drone noise measurements and modelling for drone noise reduction via propeller phase control,” in IEEE Workshop Appl. Signal Process. Audio Acoust. IEEE, 2021, pp. 286–290.
- [19] D. S. Williamson, Y. Wang, and D. Wang, “Complex ratio masking for monaural speech separation,” IEEE/ACM Trans. Audio Speech Lang. Process., vol. 24, no. 3, pp. 483–492, 2015.
- [20] Le R.J., S. Wisdom, H. Erdogan, and J. R. Hershey, “Sdr–half-baked or well done?,” in IEEE Int. Conf. Acoust. Speech Signal Process. IEEE, 2019, pp. 626–630.
- [21] V. Panayotov, G. Chen, D. Povey, and S. Khudanpur, “Librispeech: an asr corpus based on public domain audio books,” in IEEE Int. Conf. Acoust. Speech Signal Process. IEEE, 2015, pp. 5206–5210.
- [22] A. W. Rix, J. G. Beerends, M. P. Hollier, and A. P. Hekstra, “Perceptual evaluation of speech quality (pesq)-a new method for speech quality assessment of telephone networks and codecs,” in IEEE Int. Conf. Acoust. Speech Signal Process. IEEE, 2001, vol. 2, pp. 749–752.
- [23] J. Jensen and C. H. Taal, “An algorithm for predicting the intelligibility of speech masked by modulated noise maskers,” IEEE/ACM Trans. Audio Speech Lang. Process., vol. 24, no. 11, pp. 2009–2022, 2016 .




No comments:
Post a Comment